Notes: 视觉 SLAM 14 讲
- 1 分钟前Chapter 1, 2 - Introduction
两类传感器:
- 安装于环境中(比较简单),对外部提出了假设,限制了应用环境。
- 外部的二维码定位:通过扫描二维码获取到位置信息;
- GPS
- 导轨、磁条
- 携带与机器人本体之上的,强调未知环境。
- 激光:现阶段,激光建图研究方案已经比较清楚,价格较昂贵;
- 相机:以一定速率采集图像,形成视频。方案不够可靠稳定,工作条件更苛刻(光线、遮挡、需要纹理)。成像时以二维投影记录三维世界信息,丢失了距离信息。
- 单目 Monocular:必须通过移动相机产生深度;
- 双目 Stereo:左右各有一个相机,通过视差计算深度;
- 深度 RGBD:通过物理方法测量深度;量程较小,无法测量较远物体;
- 其他:鱼眼, 全景, Event Camera, etc.
视觉 SLAM 框架
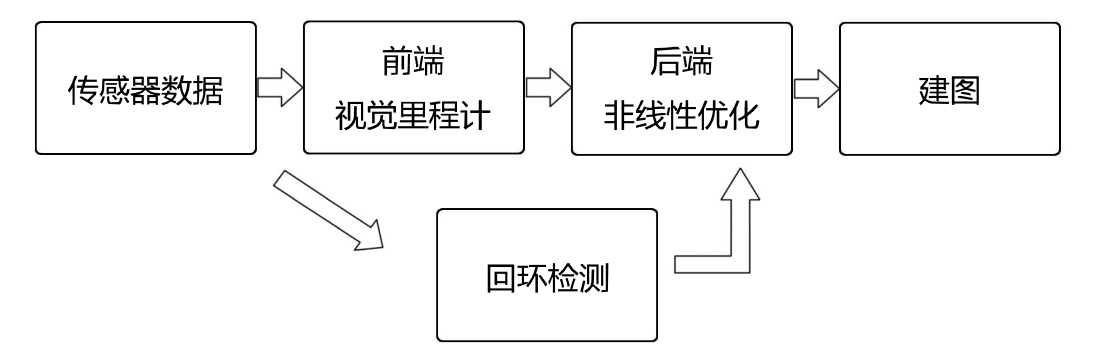
- 传感器信息读取:视觉SLAM中主要为相机图像信息的读取和预处理;
- 视觉里程计(Visual Odometry, VO):估算相邻图像间相机的运动,以及局部地图的样子。
- 不可避免有漂移(误差)
- 后端优化(Optimization): 接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。
- 回环检测(Loop Closing):判断机器人是否曾经到达过先前的位置,如果检测到回环,将信息提供给后端进行处理。
- 建图(Mapping):根据估计的轨迹,建立与任务要求对应的地图。
SLAM 问题的数学描述
假设小萝卜携带着某种传感器在未知环境里运动。
- 离散时间:\(t = 1,2,...,k\)
- 小萝卜的位置:\(x_1, x_2, ... ,x_k\)
- 将其看成随机变量,且服从一定的概率分布
- 小萝卜是从上一个时刻运动到下一个时刻的
- 运动方程:\(x_k = f(x_{k-1}, u_k, w_k)\)
- \(u_k\): 输入(运动传感器的读数)
- \(w_k\): 噪声
- 用一般函数 f 来描述这个过程,而不具体指明 f 的作用方式,使得整个函数可以指代任意的运动传感器
- 路标(三维空间点):\(y_1, y_2, ..., y_n\)
- 观测方程:\(z_{k,j} = h(y_j, x_k, v_{k,j})\)
- 当小萝卜在 \(x_k\)位置上看到了某个路标点 \(y_j\),产生了一个观测数据\(z_{k,j}\)
当我们知道运动测量的读数 u,以及传感器的读数(观测并分析后的数据) z 时,如何求解定位 x 和建图问题 。
Chapter 3 - 三维空间刚体运动
Eigen 库:矩阵运算
Pangolin: 三维显示
- 黑屏问题
- 原因:依赖库安装错误,可能是找不到 glew 库文件
- 根据 github 文档重新安装一遍
Chapter 5 - 相机与图像
OpenCV的基本操作
PCL 拼接点云
-
PCL 的安装
brew install pcl
-
pcl_viewer命令无效的解决办法
- 在 brew 安装的所有文件目录下
/usr/local/Cellar/pcl/1.9.1_5路径下有个pcl_viewer的.app文件,进入其包内,可以看到pcl_viewer的可执行程序;使用第二个命令行调用要展示的pcd文件。
cd /usr/local/Cellar/pcl/1.9.1_5/pcl_viewer.app/Contents/MacOS ./pcl_viewer /Users/inger/code/slambook14/ch5/pclMap/cmake-build-debug/map.pcd- 添加环境变量,从而通过命令行调用 pcl_viewer 查看点云图像
- 在 brew 安装的所有文件目录下
open -e .bash_profile
添加一行:
export PATH=${PATH}:/usr/local/Cellar/pcl/1.9.1_5/pcl_viewer.app/Contents/MacOS
保存后关闭,输入命令行
source .bash_profile
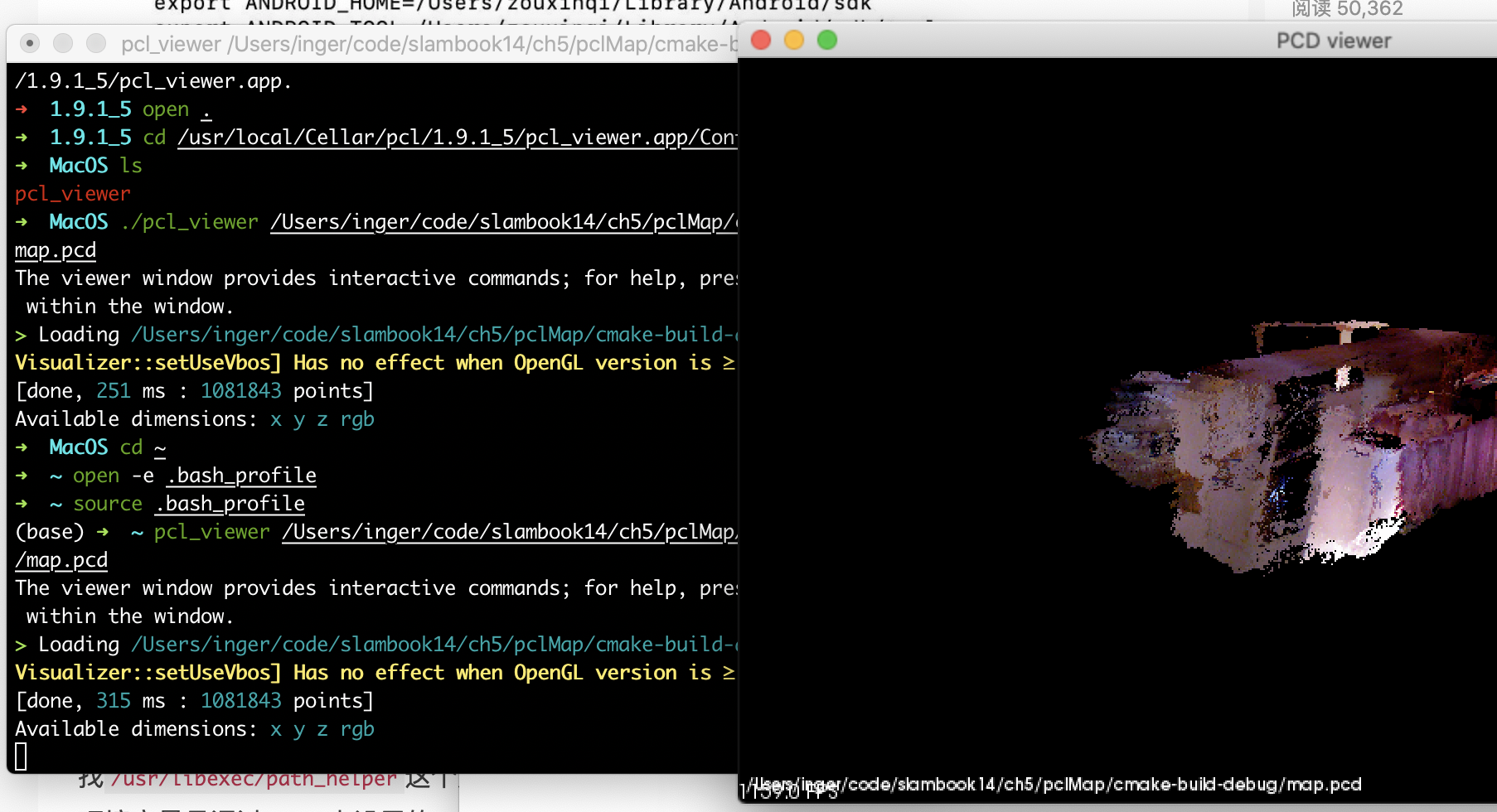
最终效果如上图,在命令行直接输入 pcl_viewer pcd文件路径即可实现相应效果。

