相机标定与测距原理及 OpenCV 实现
- 5 分钟前相机标定
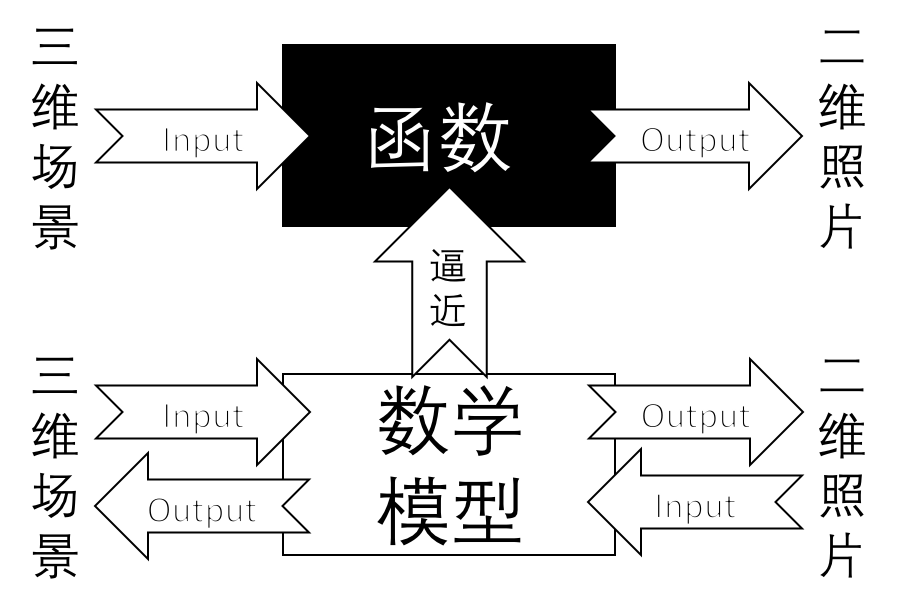
三维真实世界到二维可以理解为通过一定的函数变换得到的,那么二维到三维通过一个反函数可以实现;相机标定的目的是通过找到一个数学模型,求出这个模型的参数。「相机标定」就是通过数学模型表达复杂的成像过程,并且可以用于表示成像的反过程。
标定之后的相机可以进行三维场景的重建,通过感知到的深度构建。
将 ObjectPoint 称为物点(三维点),ImagePoint 称为像点(二维点)。
通过相机标定可以得到?
- 外参数矩阵:现实世界点(世界坐标)是怎样经过旋转和平移,然后落到另一个现实世界点(摄像机坐标)上的;
- 内参数矩阵:物点如何继续经过摄像机的镜头、并通过针孔成像和电子转化而成为像素点;
- 畸变矩阵:物点为何偏移。
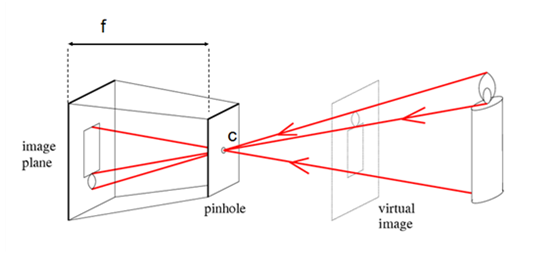
针孔相机模型的描述
对相机成像过程进行简化和建模,得到如下的针孔相机模型,本质上就是把相机简化为小孔成像。

首先建立相机坐标系,以光心 O 为 坐标系原点,X 与 Y 方向是 CCD 像素排列的水平和竖直两个方向,Z 方向垂直于 CCD 面,建立右手坐标系。其次,建立 CCD 标号坐标系,以 CCD 左上角像素标号为原点,CCD 像素排列的水平和竖直两个方向为 U 与 V 方向。
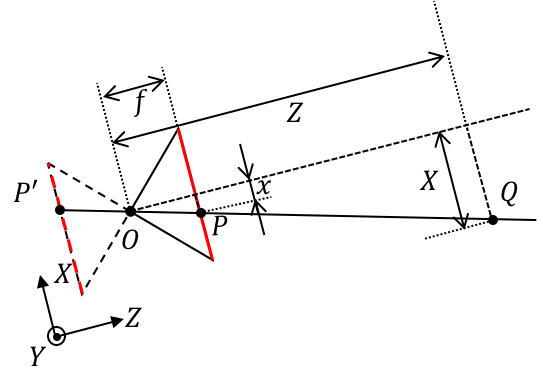
- 由光心 O 沿着光轴出发,像平面在 $Z = f$ 上,$f$ 为相机的物理焦距(单位:$mm$);
- 点 Q 在物理空间中,在相机坐标系下的位置为 $Q(X, Y, Z)$;
- 点 P 在像平面上
- 在相机坐标系下的位置是 $P(x,y,z)$;
- 在 CCD 标号坐标系下的位置是 $P(u_{ccd}, v_{ccd})$;
在无镜头畸变的条件下,光心 O、点 P 和点 Q 在一条直线上。
- $k, l$ 是 CCD 单个像素在水平和竖直两个方向上的尺寸(单位:$mm / pixel$ ),因此定义焦距为 $f_x = \frac{f}{k}, f_y=\frac{f}{l}$ (单位:像素);
- CCD 标号坐标系原点到光轴的偏移量为 $c_x,\ c_y$ (单位:像素);
- 根据相似三角形关系原理可以得出:
成像原理理论知识先不看了,看看 OpenCV 相机标定应该怎么用。
OpenCV 官方文档
Finds the camera intrinsic and extrinsic parameters from several views of a calibration pattern.
从校准图案的多个视图中查找相机的固有参数和外部参数。
double calibrateCamera(InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints, Size imageSize, InputOutputArray cameraMatrix, InputOutputArray distCoeffs, OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs, int flags=0, TermCriteria criteria=TermCriteria( TermCriteria::COUNT+TermCriteria::EPS, 30, DBL_EPSILON) )¶
方法作用:估算每个视图下相机的固有参数和外部参数。在每个视图下,3D object points 和他们相关的 2D image Points 必须明确。
参数列表:
- objectPoints(3D 点):
- imagePoints(2D 点):
暂时没看懂,先放一放
单目相机测距
原理
根据相似三角形计算单目相机到物体的距离,必须已知一个确定的长度。
假设我们有一个宽度为 W 的目标或者物体。然后我们将这个目标放在距离我们的相机为 D 的位置。我们用相机对物体进行拍照并且测量物体的像素宽度 P 。这样我们就得出了相机焦距的公式:$F= \frac{P\times{D}}{W}$
当我们将摄像头远离或者靠近A4纸时,就可以用相似三角形得到相机距离物体的距离。 此时的距离:$D’ = \frac{W’\times{F}}{P’}$。
实现Demo
必须输入一张已知相机距离的图像,然后使用相机标定算法得到位置图像距离摄像头的距离。
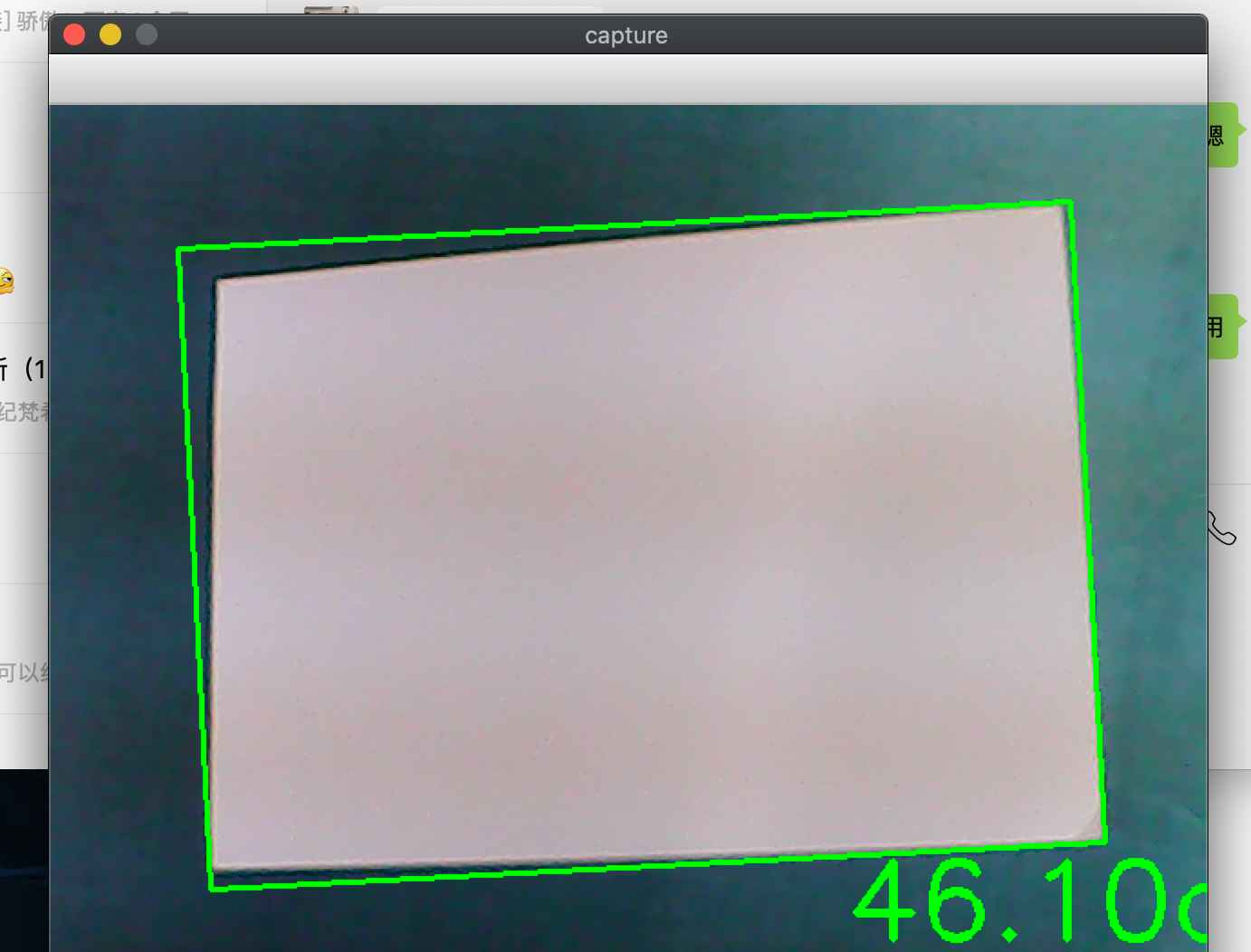
使用 Picture4 图像作为输入,实现了简单背景下的 A4纸 距离检测。
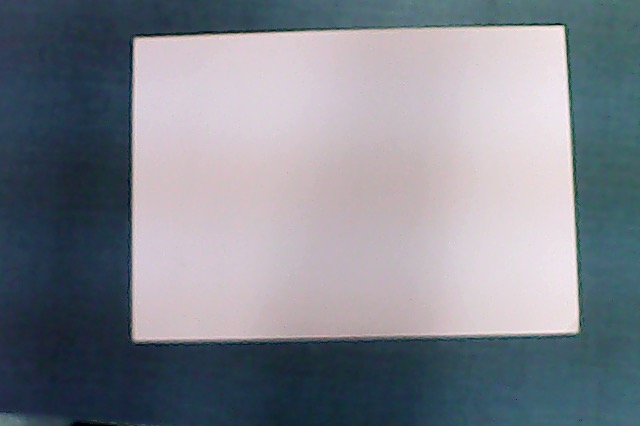
具体 demo 如下:
#!usr/bin/python
# -*- coding: utf-8 -*-
# 定义编码,中文注释
# import the necessary packages
import numpy as np
import cv2
# 找到目标函数
def find_marker(image):
# convert the image to grayscale, blur it, and detect edges
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (5, 5), 0)
edged = cv2.Canny(gray, 35, 125)
# find the contours in the edged image and keep the largest one;
# we'll assume that this is our piece of paper in the image
(cnts, _) = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# (_, cnts, _) = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# 求最大面积
c = max(cnts, key=cv2.contourArea)
# compute the bounding box of the of the paper region and return it
# cv2.minAreaRect() c代表点集,返回rect[0]是最小外接矩形中心点坐标,
# rect[1][0]是width,rect[1][1]是height,rect[2]是角度
return cv2.minAreaRect(c)
# 距离计算函数
def distance_to_camera(knownWidth, focalLength, perWidth):
# compute and return the distance from the maker to the camera
return (knownWidth * focalLength) / perWidth
# 初始化 A4 纸距离摄像头的距离
# initialize the known distance from the camera to the object, which
# in this case is 24 inches
KNOWN_DISTANCE = 20.0
# initialize the known object width, which in this case, the piece of
# paper is 11 inches wide
# 初始化 A4 纸的长和宽(单位:inches)
KNOWN_WIDTH = 11.3
KNOWN_HEIGHT = 8.4
# initialize the list of images that we'll be using
IMAGE_PATHS = ["Picture1.jpg", "Picture2.jpg", "Picture4.jpg"]
# load the furst image that contains an object that is KNOWN TO BE 2 feet
# from our camera, then find the paper marker in the image, and initialize
# the focal length
# 读入第一张图,通过已知距离计算相机焦距
image = cv2.imread(IMAGE_PATHS[2])
marker = find_marker(image)
focalLength = (marker[1][0] * KNOWN_DISTANCE) / KNOWN_WIDTH
# 通过摄像头标定获取的像素焦距
# focalLength = 811.82
print('focalLength = ', focalLength)
# 打开摄像头
camera = cv2.VideoCapture(0)
while camera.isOpened():
# get a frame
(grabbed, frame) = camera.read()
marker = find_marker(frame)
if marker == 0:
print(marker)
continue
inches = distance_to_camera(KNOWN_WIDTH, focalLength, marker[1][0])
# draw a bounding box around the image and display it
# box = np.int0(cv2.cv.BoxPoints(marker))
box = cv2.boxPoints(marker)
box = np.int0(box)
cv2.drawContours(frame, [box], -1, (0, 255, 0), 2)
# inches 转换为 cm
cv2.putText(frame, "%.2fcm" % (inches * 30.48 / 12),
(frame.shape[1] - 200, frame.shape[0] - 20), cv2.FONT_HERSHEY_SIMPLEX,
2.0, (0, 255, 0), 3)
# show a frame
cv2.imshow("capture", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
camera.release()
cv2.destroyAllWindows()
实验结果:
参考资料:
- 相机标定究竟在标定什么?
- OpenCV 2.4.6 官方文档
- 【立体视觉】世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
- 摄像头单目测距原理及实现
- 单目摄像机测距(python+opencv)
- 实时单目测距

