论文粗读|Past, Present, and Future of SLAM
- 1 分钟前Past, Present, and Future of SLAM: Towards the Robust-Perception Age
本篇论文从当下的SLAM领域的研究现状入手,回顾了相关的工作,检阅了大量相关领域的 paper,包括mapping 长期以来的健壮性和可移植性;mapping 的度量和语义表示、理论性能,并探索了一些SLAM技术应用的其他新领域;以批判性的眼光看待已经发表的文章,描绘了新的挑战和仍然值得研究的问题。
同时也包括作者对两个热议问题的看法:机器人真的需要SLAM吗?通过学者们的努力,SLAM问题解决了吗?
Introduction
SLAM的应用环境主要有两种,一种是辅助其他的任务,比如为人们提供直观的路径导航,另一种是用于降低在估算机器人状态时的误差。
循环闭合(loop closure):机器人通过查找已知区域重置定位错误的情况。因此,SLAM在不同的场景中扮演不同的角色,先前的 MAP 大多都不可用,需要重新构建。
SLAM aims at building a globally consistent representation of the environment, leveraging both ego-motion measurements and loop closures.
However, more recent odometry algorithms are based on visual and inertial information, and have very small drift.
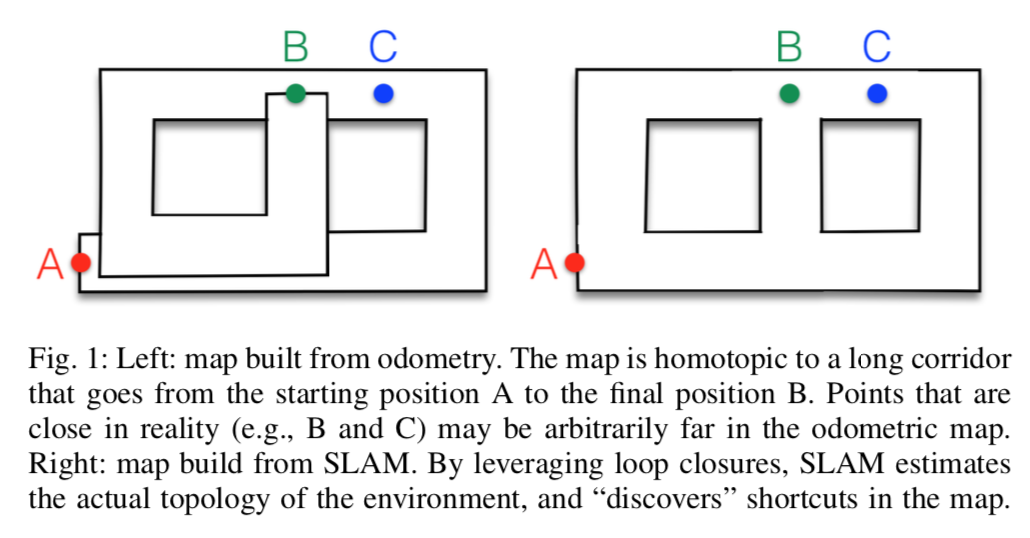
当构建从起点 A 到终点 B 的地图时,左图为基于 odometry 里程计算的 Map,可以看出是一条长长的路径,而 SLAM 通过 loop closures,走到 C 点时会发现 C 到 B 有直达的短路径。
可以从以下几个方面评估 SLAM 的成熟度问题:robot, environment, performance requirements. 例如,将 2D 室内环境与配有车轮编码器和激光扫描仪的机器人结合进行映射,具有足够的精度和鲁棒性(Kuka导航解决方案); 缓慢移动的基于视觉的 SLAM 机器人(火星探测机器人、家用机器人);还有视觉惯性测距(vision-inertial odometry)也是一个比较成熟的领域。
robor/enviornment/performance 三方面依然需要大量的基础研究,当下的 SLAM 算法在机器人快速移动或复杂环境下很容易就会失败,同样,SLAM 算法也不能满足严格的性能要求。
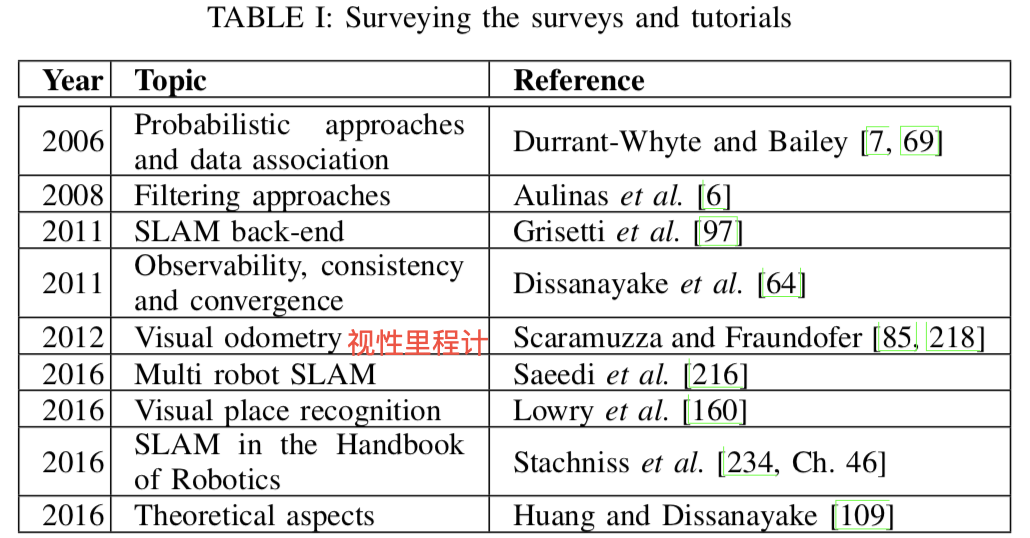
在过去三十年间,SLAM 领域取得了很大进展, 前 20 年成为 classical age,引入了 SLAM 的主要概率公式,包括基于扩展 Kalman 过滤器、Rao-Blackwellized粒子滤波器和最大似然估计的方法,阐明了与强大数据关联的基本挑战。接下来的一段时间是2004-2015,称之为 algorithmic-analysis age,引入了 SLAM 的基础要素,包括 observability, convergence, consistency. 这段时间主要研究问题是 SLAM 的效率和理解问题。
这篇论文认为当下进入了第三个阶段,robust-perception age。本阶段有以下几个关键特征:
- robust performance:在广泛的环境中长时间以较低的故障率运行;该系统包括故障安全机制,并具有根据情况选择系统参数的自调整功能
- high-level understanding :对环境的高级理解;
- resource awareness:对可用的传感和计算资源进行定制,并提高根据可利用资源调整计算负载的方法;
- Task-driven perception:要求 SLAM 系统能够以任务为驱动,自主选择相关的感知信息,过滤掉不相关的传感器数据;生成自适应的地图表示,其复杂性可能因任务而异。
以下的章节可以自行选择自己感兴趣的阅读(我选择先不读)。
###Anatomy of a Modern SLAM System
Long-Term Autonomy I: Robustness
Long-Term Autonomy II: Scalability
Representation I: Metric Map Models
Representation II: Semantic Map Models
New Theoretical Tools for SLAM
Active SLAM
New Frontiers: Sensors and Learning
Conclusion
SLAM 在很多领域都有着非常重要的应用,包括与 SLAM 息息相关的 VIO领域,在实际生活中也已经落地了许多应用,从自动驾驶到移动设备,SLAM系统在 GPS 访问不到的领域或精度不够的区域提供定位和解决方案。
我们可以根据不同的任务确定更合适的的 SLAM 系统。选择最合适的SLAM系统的一种更一般的方法是将SLAM作为一种机制来计算一个足够的统计数据,该统计数据总结了机器人过去的所有观察结果,从这个意义上说,在这种压缩表示中要保留与任务密切相关的信息。
要实现真正强大的感知、导航和长期使用的机器人,SLAM 目前还尚未得到解决,需要更多学者的努力和研究。
可以使用新型传感器、新工具(例如凸面松弛和对偶理论或深度学习)以及主动感知等技术来解决 SLAM 问题。SLAM仍然是大多数机器人应用程序不可或缺的支柱,尽管在过去几十年中取得了惊人的进展,但现有的SLAM系统远不能提供与人类轻松创建和使用的环境模型相比具有洞察力、可操作性和紧凑性的环境模型。

